|
 Présentation du
contrôleur Ethernet : Présentation du
contrôleur Ethernet :
Ce
contrôleur Ethernet a été
spécialement conçu afin
de piloter depuis
n'importe où dans le monde
l'ensemble
des dispositifs domotiques
déjà présentés sur ce site
tels que :
 [
Le
contrôleur
Telis 4 Dual
] [
Le
contrôleur
Telis 4 Dual
]
[
Le
Contrôleur
Velux Trio ]
[ L'émetteur
HF - RS232
]
[
Récepteur
HF ]
La
gestion
du contrôleur est
extrêmement simple puisqu'elle
repose simplement sur
l'envoie et la réception de chaînes
ASCII par
transfert
UDP véhiculées
via le réseau
Internet. Ainsi
vous pouvez piloter
à distance vos
volets
Somfy,
vos stores,
vos Velux électriques,
mais également vos prises
commandées et
différents dispositifs
d'éclairage,
de chauffage
ou de climatisation
au moyen du récepteur HF...
Afin
de compléter les possibilités
brièvement décrites ci-dessus,
nous avons également ajoutés
au contrôleur Ethernet 5
entrées analogiques pour
la mesure de tensions
diverses,
mais également
6 capteurs de température
permettant d'effectuer des mesures sur
plusieurs zones d'une habitation.
Nous
avons fait une fois de plus appel à
un microcontrôleur PIC18F252
très
répandu chez les distributeurs
proposant un boitier assez compact pour
un nombre d'entrées et sorties
suffisant pour la réalisation
de notre projet. De plus, comme
pour les dispositifs domotiques déjà
présentés, nous avons
choisi également pour le contrôleur
Ethernet un
coffret ABS la série MR DIN9 permettant
de clipser le coffret au sein d'un tableau électrique
standard du commerce. Les dimensions
du circuit imprimé
sont spécifiquement adaptées
aux
dimensions internes du coffret
ainsi que la
position des borniers
à vis.

Coffret
MR DIN9 pour tableau électrique
Ce
contrôleur
Ethernet
domotique est totalement
autonome et
n'a nul
besoin d'être relié à
un ordinateur
pour fonctionner puisqu'il intègre toute
l'électronique nécessaire
lui permettant une connexion
directe sur votre réseau
Ethernet.
De plus, si votre réseau est
connecté à Internet
par
l'intermédiaire d'un modem
ADSL
ou modem
Câble,
vous pouvez piloter
votre contrôleur Ethernet depuis
n'importe où dans le monde.
 Un accès
sécurisé par
mot de passe empêche
toute
personne étrangère
de prendre le contrôle de
votre domotique à
distance sans
votre consentement.
Ainsi, même si une
personne connait l'adresse IP de
votre modem de type Box ou Câble,
elle ne pourra en
aucun cas avoir accès
au contrôle de la domotique
de la maison. Un accès
sécurisé par
mot de passe empêche
toute
personne étrangère
de prendre le contrôle de
votre domotique à
distance sans
votre consentement.
Ainsi, même si une
personne connait l'adresse IP de
votre modem de type Box ou Câble,
elle ne pourra en
aucun cas avoir accès
au contrôle de la domotique
de la maison.
Afin
de piloter les boitiers domotiques de
gestion des volets, stores, Velux, prises électrique,
etc... que nous avons présentés
jadis dans d'autres articles sur ce
site, le contrôleur Ethernet
dispose d'une sortie de type liaison série.
Cette liaison série est acheminée
par câble à chaque boitier domotique chargé
de commander un ou plusieurs actionneurs électriques
de la maison par radio HF ou bien par
relais. L'ensemble de ces boitiers prendront
place au sein d'un tableau électrique
dédié à la domotique
de la maison...
 Cliquez sur l'image ci-dessus pour l'agrandir Cliquez sur l'image ci-dessus pour l'agrandir
Exemple
de câblage des différents éléments
en prenant les possibilités maximales
possibles
pour l'ensemble des différents
boitiers de commande domotique présentés
sur ce site.
Dans cette
illustration
nous utilisons un modem ADSL de type Freebox
Révolution,
mais vous pouvez connecter le contrôleur
Ethernet
à
n'importe quel modem xDSL
(Livebox, NeufBox, Bibox, etc...)
ou
fibre
FTTH
ou
bien modem câble.
Comme
nous l'écrivions précédemment,
si
votre réseau est relié
à un accès Internet via un Modem ADSL ou Modem Câble, vous
pouvez également piloter le contrôleur
Ethernet
depuis n'importe où dans le monde. Pour
ce faire, il suffit de connaître
votre adresse IP, c'est à
dire celle qui vous
a été attribuée
par votre Fournisseur d'Accès Internet (FAI)
qui vous identifie de manière
unique sur le réseau
mondial. L'élément différenciateur
permettant d'accéder à
votre interface est dans ce cas le numéro du PORT de
l'interface, c'est à dire par défaut le numéro 5030.
Afin
de piloter votre contrôleur
Ethernet
depuis votre réseau domestique
ou bien depuis un accès Internet,
deux logiciels de démonstration fonctionnant
pour l'un sous Windows écrit avec
Bordand Delphi 7 et pour
l'autre sous Android écrit avec Basic4Android sont disponibles en libre
téléchargement accompagnés
de
leur code source. La communication
entre le contrôleur Ethernet et
votre
ordinateur, ou tablette tactile
s'effectue
via le protocole UDP (User Datagram Protocol) qui
reste très simple et souple d'utilisation.
Le principe de la communication s'effectue par l'envoi et
la réception en UDP de chaînes ASCII prédéfinies extrêmement simples à utiliser vous permettant d'adapter
selon vos propres besoins les logiciels
écrits sous Borland
Delphi 7
ou sous Basic4Android.
Principales caractéristiques du
contrôleur Ethernet :
 Alimentation : comprise
entre +8V et +20V DC. +12V DC recommandé. Alimentation : comprise
entre +8V et +20V DC. +12V DC recommandé.
Courant maximum
absorbé par l'interface : 210mA.
5 entrées analogiques sur CAN 10 bits 0V - 5V avec
protections contre surtension et inversion
de
tension en entrées. Impédance
d'entrée de 1Mohm. Quantum du CAN de 4,882mV.
6 capteurs de température DS18B20 pour
6 mesures indépendantes comprises entre -55°C et +125°C. Précision
de la mesure à +/-0,5°C. Résolution de
la mesure 0,1°C.
1 sortie RS232 sur embase RCA pour
la gestion des dispositifs de commande domotique.
Vitesse
de communication fixée à
9600 bauds.
Type de commandes
via le réseau Ethernet : Chaines
de caractères de type ASCII.
Communication avec
l'interface : protocole UDP.
Contrôleur
Ethernet : 10Base-T compatible avec le 100
et 1000Base-T.
IP, PORT et adresse MAC : modifiables par l'utilisateur
via un logiciel dédié.
Configuration réseau
par
défaut : IP : 192.168.0.9, Port : 5030 et MAC : B0:FA:AF:00:05:00.
Accès sécurisé de
l'interface par mot de passe modifiable par l'utilisateur.
Mot
de passe de 16 caractères
par défaut : "ABCDEFGHIJKLMNOP".
Visualisation de
la connectivité et du transfert Ethernet par leds.
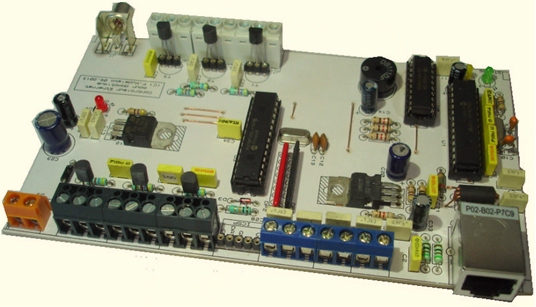
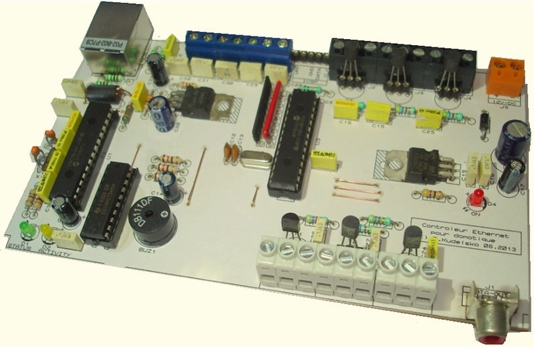
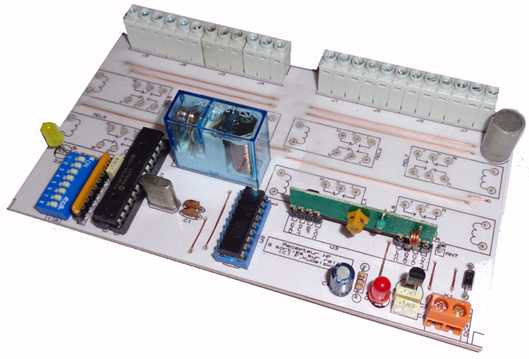
Principales
entrées
et sorties
du contrôleur Ethernet
Principaux éléments du contrôleur
Ethernet :
 Section de
gauche : Section de
gauche :
|
Encadré en bleu :
|
6 capteurs de température
associés aux 6 borniers
3 plots. |
|
Encadré en rouge :
|
embase RCA pour sortie RS232 à
9600 bauds. |
|
Encadré en vert :
|
alimentation régulée
à
5V. |
|
Encadré en bleu
clair
:
|
microcontrôleur PIC associé
à son quartz. |
|
Encadré en marron
: |
connecteur utilisé
pour développer le
programme. Ne pas monter. |
|
Encadré en orange : |
deux réseaux de diodes
à anodes et cathodes
communes. |
|
Encadré en violet : |
bornier d'alimentation DC. |
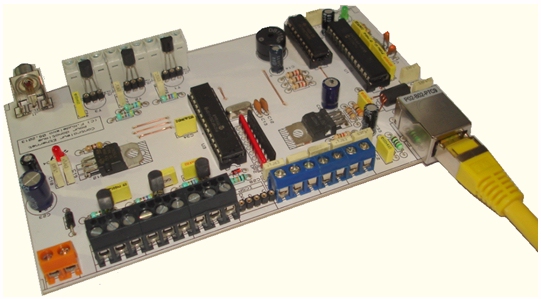
Section
de droite :
|
Encadré en bleu :
|
borniers
associés aux 5 entrées analogiques INA1 à INA5 (0V/5V).
|
|
Encadré en rouge :
|
régulateur de tension
en 3,3V. |
|
Encadré en vert :
|
section Ethernet avec son ENC28J60
et son embase Ethernet. |
|
Encadré en orange : |
buzzer chargé d'émettre
un bip lors de chaque commande
reçue par Ethernet. |
Présentation des logiciels de gestion
pilotant le contrôleur Ethernet
:
Afin de piloter le
contrôleur Ethernet
que ce soit depuis votre réseau
domestique ou depuis n'importe où
dans le monde, deux logiciels d'application ont
été écrits l'un
pour Windows via Borland
Delphi 7 et l'autre pour Android via Basic4Android. Ces deux
logiciels sont disponibles en libre
téléchargement
au chapitre [ Utilisation ].
Logiciel
pour

Le logiciel
est compatible avec  ,
Seven, Vista et XP mais il n'a
pas été testé sous les OS antérieurs. ,
Seven, Vista et XP mais il n'a
pas été testé sous les OS antérieurs.
En plus du fichier exécutable, vous trouverez
le code source du logiciel
afin de vous aider dans l'écriture de
votre propre logiciel sous différentes langages: Delphi, Visual Basic,, C++,
etc...
Cliquez sur l'image ci-dessus pour l'agrandir
Aspect du logiciel de démonstration
permettant
de piloter le [
Contrôleur
Telis 4 Dual ]
ainsi
que le [
Contrôleur
Velux Trio ]
mais
aussi l'[
Emetteur
HF - RS232]
et
pour finir le [ Récepteur
HF ]
.
Il
permet également de connaitre la
valeur des potentiels appliqués
sur ses 5 entrées analogiques
et de mesurer la température
sur 6 zones simultanément.
Les
5 entrées analogiques du CAN
10 bits (partie inférieure du
logiciel) :

Cliquez sur l'image ci-dessus pour l'agrandir
La
valeur décimale représentative
du potentiel présent sur les
entrées INA1 à INA5 évolue
entre 0 (0% du bargraph) et 1024 (100%
du bargraph).
La tension mesurée sur les entrées
est affichée en Volts
(3
chiffres après la virgule) pour
une évolution sur les entrées
comprise entre
0V et 5V.
Le Quantum 'Q' du CAN est
Q = 5 /
1024 = 4.882mV.
Les 6
capteurs de températures permettant
une mesure sur 6 zones :

Cliquez sur l'image ci-dessus pour l'agrandir
La
mesure de température s'effectue
en
degré centigrade
sur
une plage de mesure comprise entre
-55°C et +125°C.
La
gestion du contrôleurs Telis 4
Dual :
Vous
pouvez gérer de
un
à quatre
[
Contrôleur
Telis 4 Dual ].
Dans
le cas présent, le logiciel fourni
un exemple pour un seul exemplaire
du
[
Contrôleur
Telis 4 Dual ].

Aspect
du
[
Contrôleur
Telis 4 Dual ].
La
gestion du contrôleur Velux Trio
:
Vous
pouvez gérer de
un
à trois
boitiers [
Contrôleur
Velux Trio ]
.
Dans
le cas présent, le logiciel fourni
un exemple pour un seul exemplaire
du
[
Contrôleur
Velux Trio ]
.

Aspect
du
[
Contrôleur
Velux Trio ].
La
gestion de l'émetteur HF RS232
:

Vous
pouvez gérer les prises commandées

grâce
à l'[
Emetteur
HF - RS232].

Aspect
de l'[
Emetteur
HF - RS232].

Exemplaire
de prises commandées
disponibles
à la vente dans une grande enseigne
de bricolage.
La
gestion du récepteur HF :
Vous
pouvez piloter l'ensemble des 8 relais
du [ Récepteur
HF ]
sachant
que vous pouvez gérer au maximum
255 exemplaires du [ Récepteur
HF ].
Aspect
du [ Récepteur
HF ].
Logiciel
sous
 pour
tablette tactile 10 pouces : pour
tablette tactile 10 pouces :
Cliquez sur l'image ci-dessus pour l'agrandir
Photo du logiciel installé sur une tablette tactile Android de 10 pouces
possédant une résolution 1280 x 800.
On
y retrouve exactement les mêmes commandes
et
les mêmes mesures de températures et de tension
que
pour la version Windows du logiciel présentée
précédemment.
Exemple
de connexions sur les entrées
analogiques du contrôleur Ethernet :
Vous
pouvez effectuer 5 mesures simultanées de
5 potentiels différents
tant que ceux-ci restent dans la fourchette 0V à 5V. Des protections ont
été placées sur
ces 5 entrées afin de prévenir
les risques de destruction.
|