|

 Présentation de l'interface universelle : Présentation de l'interface universelle :
Le développement à grande échelle des systèmes d'automatisation de toutes sortes
à fait apparaître dans les foyers, au bureau et dans les lieux publics
des petites centrales destinées à la commande de toutes sortes d'appareils
électriques.
Qu'elles soient pilotées par liaison filaire ou à
distance, l'attrait de ces dispositifs est en constante augmentation chez le
particulier. Bien qu'il existe de nombreux produits similaires dans le commerce
sous la forme de kits ou bien encore prêt à l'emploi, voici une solution
alternative peu onéreuse à réaliser soi-même.
Composée
d'un grand nombre d'entrées
et
sorties
numériques,
cette carte innove en proposant également
des entrées
et
des sorties
analogiques ainsi
qu'une gestion d'écran LCD.
Les
nombreuses
sorties numériques
et PWM
vous permettent de piloter des relais,
des leds, des triacs ou optio-triacs, ou bien
encore faire varier la vitesse de rotation
d'un moteur à courant continu...
Vous
pouvez également suivre l'évolution
des
états logiques
présents sur les différentes
entrées
de l'interface où l'on peut y
connecter de nombreux circuits logiques,
micro-switchs, opto-coupleur, etc...
Enfin
les
entrées analogiques
vous permettent de mesurer des potentiels
issus par exemple de capteurs de température,
de pression, de lumière, etc...
Se
laissant très simplement piloter
à partir d'une liaison série
ou bien USB, deux logiciels d'application
écrits en Bordand Delphi
sont disponibles en libre téléchargement et sont accompagnés de leurs
codes sources. Comme
vous le verrez, les
commandes sont extrêmement simples à maitriser aussi
bien pour une communication RS232 ou bien
USB,
vous laissant la plus totale liberté
dans vos développements...
|

|
|
|
Logiciel
en version
RS232
|
Logiciel
en version USB
|
Principales caractéristiques de l'interface universelle
:
 Tension d'alimentation : entre +8V
(min) et
+22V
(max) DC. Tension d'alimentation : entre +8V
(min) et
+22V
(max) DC.
Communication RS232 (19200 bauds) ou USB configurable
sur la platine par cavalier.
16 entrées numériques 0 /
5V avec pull-up ou pull-down configurable
par cavalier.
40 sorties numériques
0 / 5V (extensibles
à 64 sorties maxi en utilisant
le connecteur K4).
2 sorties PWM
(précision sur 8 bits) pour une
fréquence du signal de 15kHz comprenant :
-
2 sorties analogiques 0V à
5V.
-
2 sorties PWM à collecteur ouvert
avec variation du rapport cyclique de
0 à 100% (courant
maxi 100mA pour 40V).
2 entrées analogiques de 0 à 5V pour une conversion
analogique - numérique sur 12
bits.
1 LCD standard
rétro ou non rétro-éclairé
de 8
ou
16 ou 20 caractères avec 2 ou
4 lignes.
Délais
de réaction moyen de l'interface
avec la liaison RS232 : 500ms.
Délais
de réaction moyen de l'interface
avec la liaison USB : 5ms.
Port RS232 :
câble RS232 droit câblé
fils à fils.
Port USB : câble compatible
USB
2.0 ou 1.1.
Configuration
minimale : CPU Pentium 4 avec port USB
ou RS232.
OS conseillés  8,
Seven,
Vista et XP. 8,
Seven,
Vista et XP.

Présentation de l'interface
:
 Partie supérieure du circuit imprimé : Partie supérieure du circuit imprimé :

Principales
embases de l'interface
|
Entouré en bleu :
|
embase USB. |
|
Entouré en rouge :
|
section alimentation avec
filtrage, régulation
en tension, etc... |
|
Entouré en vert :
|
embase RS232 et son MAX232. |
|
Entouré en bleu
clair : |
cavalier permettant de définir
le fonctionnement en mode
RS232
ou USB.
|
Partie centrale gauche du circuit imprimé :

Toutes les entrées disposent
d'une connexion au +5V et à la
masse (GND).
|
Entouré en bleu :
|
8 entrées
numériques référencées
J1. |
|
Entouré en rouge :
|
8 entrées numériques
référencées
J2. |
|
Entouré en bleu
clair : |
cavalier SW1
permettant de définir
un pull-up ou pull-down
aux 16 entrées.
|
Partie inférieure gauche du circuit imprimé :

L'intensité lumineuse
des leds vertes D8 et D10
dépend
du rapport cyclique sur PWM1 et PWM2.
|
Entouré en bleu :
|
les 3 premières
sorties associées
au signal PWM1 référencées
J7. |
|
Entouré en rouge :
|
les
3 secondes sorties associées
au signal PWM2 référencées
J8. |
|
Entouré en vert :
|
l'adaptateur d'impédance
constitué par un ampli-opérationnel. |
Partie inférieure du circuit imprimé :

Les deux entrées du CAN
12 bits sont protégées
contre les surtensions
au moyen d'un
couple composé par deux diodes
D1 et D2 puis D3 et D4.
|
Entouré en bleu :
|
la première
entrée analogique
J5. |
|
Entouré en rouge :
|
la seconde entrée analogique J6. |
|
Entouré en vert :
|
le CAN 12 bits à double
entrée et sa référence
de tension à 4,096V. |
Partie basse du circuit imprimé :
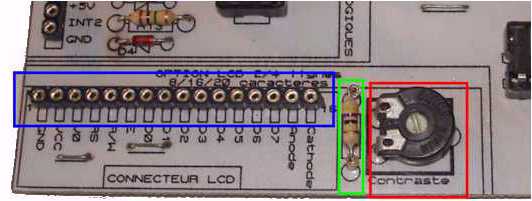
Le
routage du connecteur est conçu
pour recevoir des
LCD pourvus ou
non pourvus de rétro-éclairage.
|
Entouré en bleu :
|
connecteur dédié
à recevoir votre
afficheur LCD. |
|
Entouré en rouge :
|
réglage du contracte du LCD. |
|
Entouré en vert :
|
limitation en courant pour les
afficheurs
équipés d'un
rétro-éclairage. |

Photo
avec un afficheur LCD bleu rétro-éclairé disposant
de
4 lignes pour 20 caractères.
Vous
pouvez utiliser n'importe quel modèle
de LCD, 2 lignes pour 16 caractères,
etc...
Partie droite du circuit imprimé :

Les
40 sorties numériques
pilotées
chacune par un circuit de gestion utilisant
le protocole I²C de Philips.
De quelle manière peut-on utiliser les entrées
/ sorties de l'interface ?
:
Afin
d'illustrer les différentes possibilités
de connectivités de l'interface,
voici ci-après quelques exemples
d'application...
Sorties numériques de l'interface :
 Connexion
à
un autre microcontrôleur :
Connexion
à
un autre microcontrôleur :
Vous
pouvez directement connecter certaines
broches des
40
sorties numériques
de l'interface à l'un des ports d'un microcontrôleur
comme ci-dessous
:

Le
logiciel vous permet de saisir sous
forme décimale la valeur de l'octet
à envoyé sur la sortie
désirée. Par exemple,
ici nous envoyons 125 sur la sortie
J3 (0111 1101 en binaire), 255 pour
la sortie J4, etc...
Connexion
d'un ou plusieurs relais 1T :
Utilisez
un circuit ULN2803
afin
de piloter des dispositifs gourmands
en courant, tel que relais, moteur,
etc... alimentés sous des tensions
supérieures ou égales
à +5V.

Connexion
d'une led directement en sortie de
l'interface :
Exemple
de connexion directe d'une led sur l'une
des sorties de l'interface constituée
par un circuit PCF8574.
Chaque
ligne de sortie de l'interface peut
débiter un maximum de 100µA,
toutefois elle peut commuter à
la masse
un courant de 25mA,
ce qui est amplement suffisant pour
connecter directement une led.

Connexion
d'une led avec l'aide d'un transistor
intermédiaire :
Exemple
où le transistor BC337 sert d'étage
intermédiaire entre la sortie
de l'interface et la led.

Connexion
d'une ampoule 230V sur l'une des sorties
de l'interface :
Grâce
à l'usage d'un opto-triac, la
commande de dispositifs connectés
au réseau électrique devient
enfantine. Voici un exemple vous permettant
de commander une ampoule sur 230V.
 Cliquez sur l'image ci-dessus pour l'agrandir Cliquez sur l'image ci-dessus pour l'agrandir
Connexion
d'une led et d'un relais alimentés
en +12V :
En
plus de la led, nous connectons
ici un relais sous des tensions supérieure à +5V comme
dans l'exemple ci-dessous ou nous utilisons
un relais en +12V :
Sachez
qu'il n'est pas nécessaire de
placer une diode 1N4007
de roue libre en parallèle avec
le bobinage du relais, car l'ULN2803
dispose sur toutes ses sorties d'une
diode dont les cathodes sont toutes
reliées en interne au VCC (pin
10).
Entrées numériques de l'interface
:
Connexion
de boutons poussoirs et de micro-switchs
:
Dans
le cadre de cet exemple, nous avons
placé le cavalier SW1 en
configuration pull-up afin de disposer des résistances
de rappels intégrées à
l'interface sur l'ensemble des 8 entrées.
Une
pression sur les boutons poussoirs 1
à 4 nous permet de modifier le
quartet de poids fort appliqué
à ces entrées. Idem pour les
micro-switchs placés sur le quartet
de poids faible.

Le
logiciel vous affiche au format décimal
la valeur de l'octet présent
à la fois sur l'entrée
J1 (composée de 8 entrées)
mais également l'octet de l'entrée J2 (composée
de 8 entrées).

Connexion
de boutons poussoirs et d'un circuit
TTL :
Nous
plaçons le cavalier SW1 sur le
mode pull-down afin de disposer des résistances
de rappels à la masse sur l'ensemble des
8 entrées.
Un
compteur binaire en technologie TTL
(7490) est placé sur le quartet
de poids faible. Quatre
boutons poussoirs reliés
au +5V nous permettent de changer le
quartet de poids fort...

Connexion
avec isolation optique :
Nous avons
placé le cavalier SW1 en
configuration pull-up afin de disposer des résistances
de rappels intégrées à
l'interface sur l'ensemble des 8 entrées.
Ce mode est nécessaire pour la
polarisation du transistor NPN
intégré
à l'opto-coupleur
TIL111.
Le
signal logique est envoyé sur
l'entrée
n°1 de
l'interface. Une led permet de visualiser
l'état logique 0
ou
5V
appliqué sur le bornier deux
plots.

Pour
des états logiques présents
en entrée compris entre
0 et 12V,
remplacez la résistance de 470
ohms par
une résistance de 2,2k.
Sorties PWM de l'interface :
Connexion
d'une led sur la sortie PWMT1 :
La
sortie PWMT1 utilise un transistor référencé
T1 sur l'interface comme tampon intermédiaire. Nous
pouvons lui connecter un dispositif
donc la tension d'alimentation n'excède
pas les 40V pour un courant maximum
de 100mA. Au delà, le transistor
T1 de l'interface sera détruit.
Dans
le cadre de cet exemple, nous avons
connecté une led dont nous faisons
varier l'intensité lumineuse
en fonction du rapport cyclique délivré
sur PWMT1.

Le
logiciel vous permet de modifier les
réglages associés aux
deux sorties PWM, c'est à dire
les sorties référencées
J7 et J8 de l'interface.
Connexion
d'un moteur à courant continue
sur la sortie analogique DAC1 :
La sortie
analogique DAC1 délivre un potentiel
compris entre 0 et 5V (en théorie)
en fonction du rapport cyclique choisi
par l'utilisateur.
Cette
tension vient s'additionner avec le
potentiel de régulation +5V du
7805 nous permettant d'obtenir en sortie
OUT un potentiel variable compris entre
5V lorsque DAC1=0V et 10V lorsque DAC1=5V.
Bien entendu, l'entrée du régulateur
doit être reliée à un potentiel
supérieur à 10V !

Connexion
d'un moteur à courant continue
sur la sortie PWM1 :
Un
MOS-FET de
puissance est chargé de faire varier
la vitesse de rotation d'un moteur à
courant continu en
jouant sur le rapport cyclique du signal
délivré par l'interface
au niveau de PWM1.
Notez
qu'il est parfaitement possible de remplacer
le moteur par une ampoule, par un ventilateur
de PC (12V ou 24V) , etc... Il faudra
toutefois penser à ajuster la tension de service du condensateur
de 220µF en fonction de la tension
d'alimentation +V.

Entrées analogiques (convertisseur analogique
numérique CAN 12 bits) de l'interface
:
Connexion
d'un ajustable au CAN :
En
vous référant au schéma
de principe de l'interface, vous pouvez
remarquer que le CAN est alimenté à
partir d'une référence
de tension de 4,096V. De la sorte, le
CAN
12 bits possédant 4096 pas de
quantification, nous obtenons un quantum
pour le CAN de q = 4.096 / 4096 soit
un quantum de q=1mV.
Ainsi,
par exemple si le potentiel envoyé
au niveau
de INT1 est de
664mV,
le logiciel sous Windows vous affiche
la valeur 664
en
correspondance avec l'entrée
J5.

Connexion
d'un capteur de température sur
le CAN :
Nous plaçons
un capteur de température LM35
possédant une sensibilité
de 10mV/°C sur
l'entrée analogique
de l'interface. Sachant que le quantum
du CAN est de 1mV, vous n'aurez aucun
mal à afficher sur votre logiciel
la température
mesurée par le capteur...

Utilisation d'un LCD sur l'interface :
Vous
pouvez connecter n'importe quel type
d'afficheur LCD alphanumérique
à l'interface. La
gestion du LCD se fait en mode 4 bits
au moyen des broches D4 à D7.
Notez que les broches 15 et 16 du connecteur
sont dédiées au rétro-éclairage
du LCD pour les modèles qui en
sont équipés.

La
partie basse du logiciel vous permet
de saisir et d'envoyer votre texte au
LCD ligne par ligne...
|